Abnormal Event Detection at 150 FPS in MATLAB
Authors: Cewu Lu, Jianping Shi, Jiaya Jia
Introduction
Difficulties in detecting abnormal events based on surveillance videos
- Hard to list all possible negative samples
Traditional method
-
Normal patterns are learned from training
-
And then the patterns are used to detect events deviated from this representation
Other methods
-
Trajectories extracted from object-of-interest are used as normal patterns
-
Learn normal low-level video feature distributions(exponential, multivariate Gaussian mixture, clustering)
-
Graph model normal event representations which use co-occurrence patterns
-
sparsity-based model(not fast enough for realtime processing due to the inherently intensive computation to build sparse representation)
Sparsity Based Abnormality Detection
-
Sparsity: A general constraint to model normal event patterns as a linear combination of a set of basis atoms
-
Computationally expensive
$\beta$ : parse coefficients
$|x-D\beta|^2_2 $ :data fitting term
$|\beta|_0$ : sparsity regulization term
$s$ : parameter to control sparsity
- abnormal pattern: large error result from $|x-D\beta|^2_2$
-
Efficiency problem
Adopting $min|x-D\beta|^2_2$ is time-consuming :
-
find the suitable basis vectors (with scale $s$) from the dictionary (with scale $q$) to represent testing data $x$
-
Search space is large ( $(^q_s)$ different combinations )
-
-
Our contribution
-
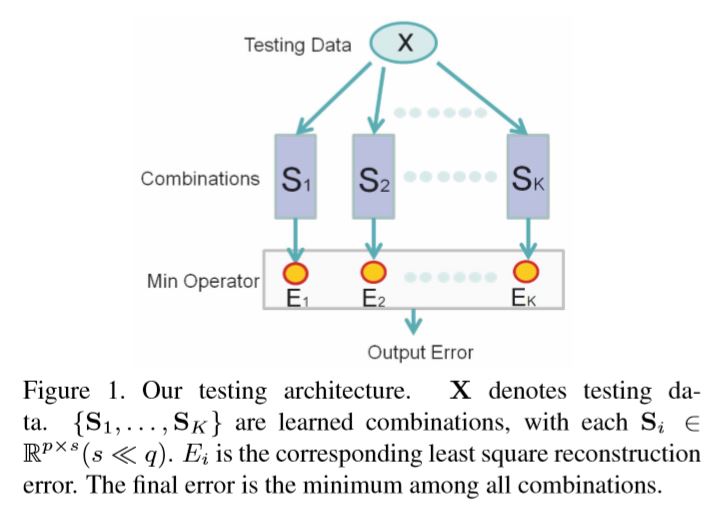
Instead of coding sparsity by finding an $s$ basis combination from $D$ in $min|x-D\beta|^2_2$, we code it directly as a set of possible combinations of basis vectors
-
We only need to find the most suitable combination by evaluating the small-scale least square error
-
Freely selecting $s$ basis vectors from a total of $q$ vectors, the reconstructed structure could deviate from input due to the large freedom. However, in our method, each combination finds its corresponding input data
-
It reaches 140∼150 FPS using a desktop with 3.4GHz CPU and 8G memory in MATLAB 2012.
-
Methods
Learning Combinations on Training Data
- Preprocess
-
Resize each frame into different scales as “Sparse Reconstruction Cost for Abnormal Event Detection”
-
Uniformly partition each layer to a set of non-overlapping patches. All patches have the same size
-
Corresponding regions in 5 continuous frames are stacked together to form a spatial-temporal cube.
-
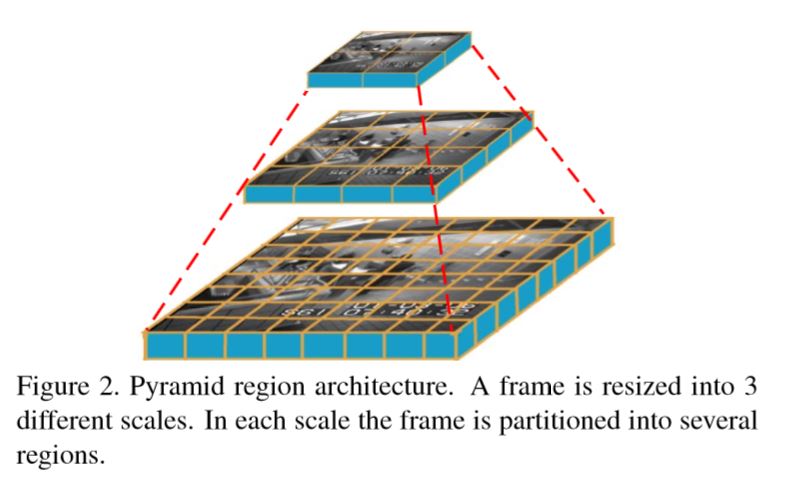
This pyramid involves local information in fine-scale layers and more global structures in small-resolution ones.
-
With the spatial-temporal cubes, we compute 3D gradient features on each of them following “Anomaly Detection in Extremely Crowded Scenes Using Spatio-Temporal Motion Pattern Models”
-
Features are processed separately according to their spatial coordinates. Only features at the same spatial location in the video frames are used together for training and testing.
-
-
Learning Combinations on Training Data
-
3D gradient features in all frames gathered temporally for training are denoted as . Each $x_i$ has $p$ features and there are $n$ $x_i$ in the $X$
-
Our goal is to find a sparse basis combination set with each $S_i \in R^{p*s}$. Each $S_i$ combines $s$ dictionary basis vectors and each basis vector has $p$ features which correspond to the features in $x_i$. Each $S_i$ belongs to a closed, convex and bounded set, which ensures column-wise unit norm to prevent over-fitting
-
Reconstruction Error
-
Each $\gamma_j^i$ indicates whether or not the $i^{th}%$ combination $S_i$ is chosen for data $x_j$ and only one combination $S_i$ is selected for each $x_j$
-
$K$ must be small enough because a very large $K$ could possibly make the reconstruction error $t$ always close to zero(Don’t understand), even for abnormal events. However, we want the errors to be larger for abnormal events
-
-
Optimization for Training
-
Problem : Reducing $K$ could increase reconstruction errors $t$. And it is not optimal to fix $K$ as well, as content may vary among videos
-
Solution : A maximum representation strategy. It automatically finds $K$ while not wildly increasing the reconstruction error $t$. In fact, error $t$ for each training feature is upper bounded in our method
-
Updated function
- $\lambda :$ We obtain a set of combinations with a small $K$ by setting a reconstruction error upper bound $\lambda$ uniformly for each $S_i$. If $t_j$ is smaller than $\lambda$, the coding result is with good quality
-
-
Algorithm
-
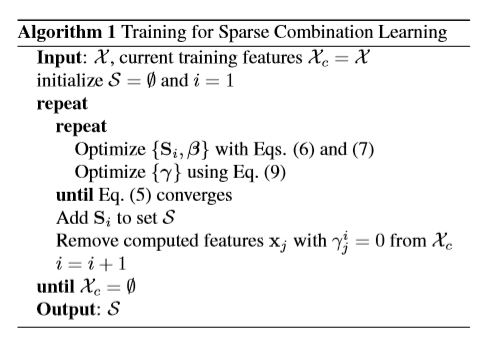
In each pass, we update only one combination, making it represent as many training data as possible
-
This process can quickly find the dominating combinations encoding important and most common features
-
Remaining training cube features that cannot be well represented by this combination are sent to the next round to gather residual maximum commonness
-
This process ends until all training data are computed and bounded
-
The size of combination $K$ reflects how informative the training data are
-
In each pass, we solve the equation above by interatively update ${S_s^i,\beta}$ and $\lambda$
- Update ${S_s^i,\beta}$ :
(Optimize $\beta$ while fixing $S_i$ for all $\gamma_j^i \neq 0$)
( Using block-coordinate descent( Online learning for matrix factorization and sparse coding and set $\delta = 1E-4$)
- Update $\gamma$ :
The algorithm is controlled by $\lambda$, Reducing it could lead to a larger $K$
-
-
Testing
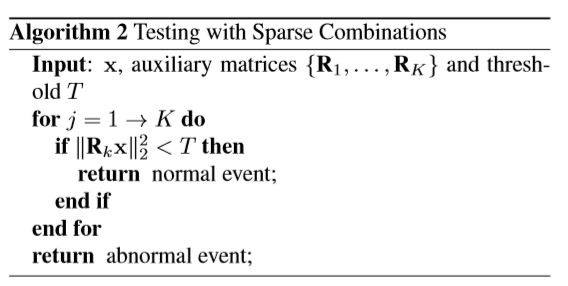
- With the learned sparse combinations $S = {S_1, …, S_K}$, in the testing phase with new data $x$, we checki f there exists a combination in $S$ fitting the $\lambda$. It can be quickly achieved by checking the least square error for each $S_i$
- optimal solution :
- Reconstruction error in $S_i$ :
-
It is noted that the first a few dominating combinations represent the largest number of normal event features.
-
Easy to parallel to achieve $O(1)$ complexity
-
Average combination checking ratio $= \frac{The\ number\ of\ combinations\ checked}{The\ total\ number\ K}$
- Relation to Subspace Clustering
Experiments
System Settings
-
Resize each frame to 3 scales: $20*20, 30*40, 120*160$ pixels respectively
-
Uniformly partition each layer to a set of non-overlapping 10×10 patches (totaly 208 sub-regions for each frame $\frac{20*30+30*40+120*160}{10*10}=208$ )
-
Corresponding sub-regions in 5 continuous frames are stacked together to form a spatial temporal cube with resolution $10*10*5$
-
Compute 3D gradient features on each cube and concatenate them into a 1500-dimension feature vector
-
Reduce the feature vector to 100 dimensions via PCA
-
Normalize the reduced feature vector to make it mean 0 and variance 1
-
For each frame, we compute an abnormal indicator $V$ by summing the number of cubes in each scale with weights
$v_i$ : the number of abnormal cubes in scale $i$, the top scale is with index $1$ while the bottom one is with $n$.
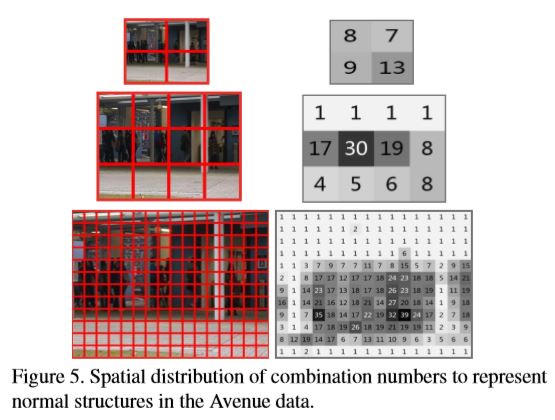
Verification of Sparse Combinations
-
Each video contains 208 regions and each region correspond to a cube and there are 6000-12000 features in each sube
-
The features are used to verify the combination model. The number of combinations for each region is $K$
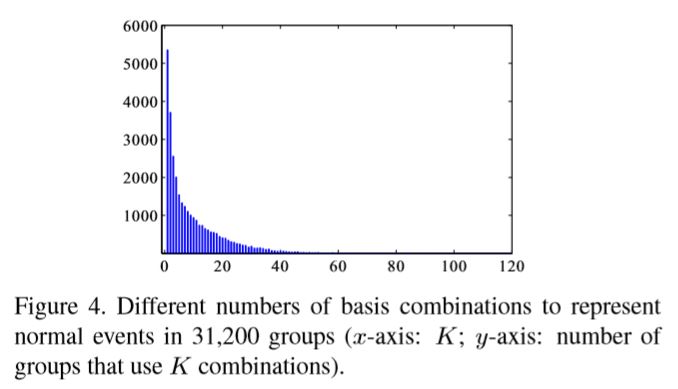 The mean of $K$ is 9.75 and variance is 10.62, indicating 10 combinations are generally enough in our model
The mean of $K$ is 9.75 and variance is 10.62, indicating 10 combinations are generally enough in our model
说人话
-
假设有一个学习好的$D\in R^{p \times q}$, 稀疏系数$\alpha_i$的0范数小于等于$s$
也就是每个样本$x_i$最多能用$s$个字典基来表达。因为要稀疏,显然有$s « q$
对于每个$x_i$,测试时都要从$q$个字典基中找出$s$个来表示,要求使得损失函数最小。
因此这种测试方式很花时间(每次都在求解一个优化问题)
-
这篇文章主要解决了效率问题,提出了新的测试方式(训练$D$的方式也随之改变):
预先训练好$K$个稀疏表达$S_1 … S_K$,每个表达$S_i$都由$D$中的$s$个字典基组成
测试时,将$x_i$与每个$S_i$计算得到损失函数,选择损失最小的$S_i$即可
-
重点在于得到$K$个$S_i$:
设置一个损失函数上限$\lambda$,低于这个上限就认为编码质量好
每个周期更新一个$S_i$,使其遍历在之前的周期还未被很好表达的$x_i$(也就是说,不论用什么已获得的$S_i$,该$x_i$的损失函数都超过$\lambda$)。
对于每个周期未被很好表达的$x_i$,都留到下一个周期通过新的$S_i$来表达。如此循环直到所有$x_i$都可以被很好的表达。
-
在每次循环得到新的$S_i$的过程中:
目标函数为:
分 2 步解决这个问题
-
更新$S_s^i,\beta$ :
(更新 $\beta$ 时固定 $S_i$ 并且所有 $\gamma_j^i \neq 0$)
详情请见Online Learning for Matrix Factorization and Sparse Coding中的算法1和算法2
-
更新$\gamma$ :
-
-
测试
对于目标函数:
最优解为:
损失函数可化为: